感应电机无传感器矢量控制探究


 (1)
(1)
 (2)
(2) (3)
(3) 为转子电阻,
为转子电阻, 为转子电流,
为转子电流, 为绕组磁链,且有,
为绕组磁链,且有, (4)
(4) 为励磁电感,
为励磁电感, 为定子电流。将(4)代入(3),有
为定子电流。将(4)代入(3),有 (5)
(5) (6)
(6) ,由式(6)可知,
,由式(6)可知, (7)
(7) (8),由式(8)可知转差转速可按照图4计算。
(8),由式(8)可知转差转速可按照图4计算。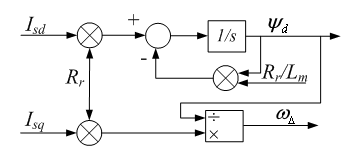
 (9)
(9)
、可以通过感应电机空载法和堵转法测试计算获得。









(1)
(2) (3)为转子电阻,为转子电流,为绕组磁链,且有, (4)为励磁电感,为定子电流。将(4)代入(3),有 (5) (6),由式(6)可知, (7) (8),由式(8)可知转差转速可按照图4计算。
(9)
、可以通过感应电机空载法和堵转法测试计算获得。