河南求同电气科技有限公司
网站首页
关于我们
新闻动态
公司动态
产品展示
电力电子领域
电力系统领域
新能源领域
项目案例
技术支持
技术分享
资料下载
联系我们
加入求同
网站首页
关于我们
新闻动态
公司动态
产品展示
电力电子领域
电力系统领域
新能源领域
项目案例
技术支持
技术分享
资料下载
联系我们
加入求同
所在位置 >
首页
公司动态
产品展示
电力电子领域
新能源车工况模拟系统
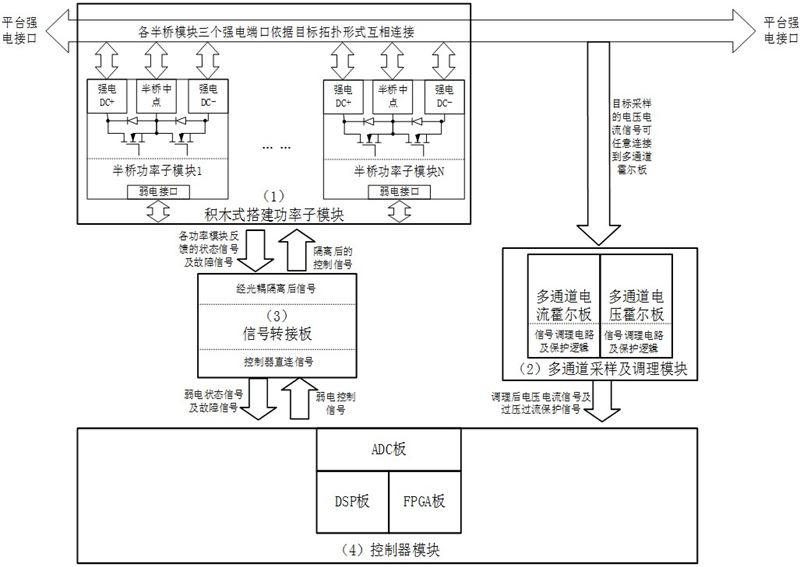
积木式电力电子技术开发平台
开放式电能变换与控制技术开发平台
微电网开放式科研开发平台
模块化多电平柔性直流输电动模试验系统
电力系统领域
电力系统及综合自动化教学实验平台(5+1)
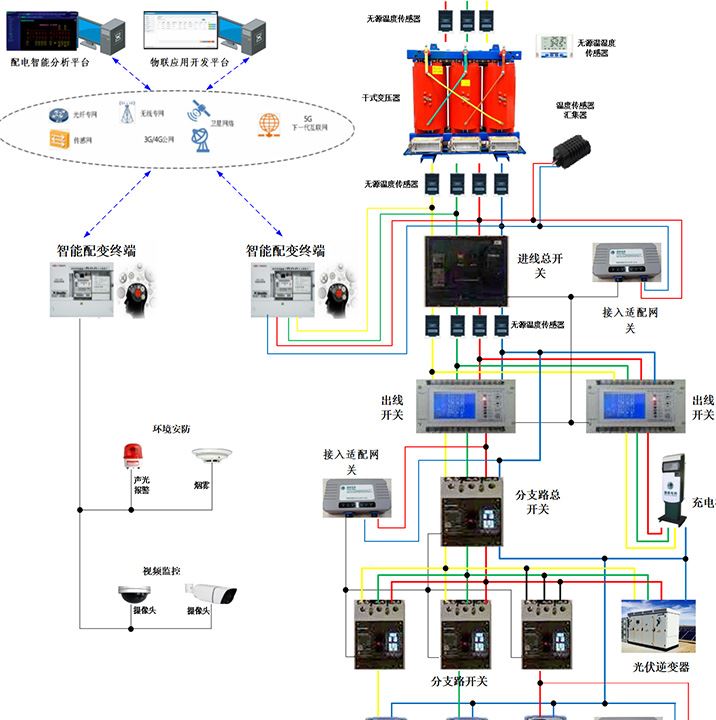
电力物联网实验系统
智能变电站实时数字仿真实验系统
新能源领域
兆瓦级风力发电机组仿真实验系统
风电场监控系统仿真
项目案例
大学智能微电网实验系统
模块化多电平柔性直流输电实验系统
感应电机无传感器矢量控制探究
文章来源:河南求同电气科技有限公司
摘要:感应电机矢量控制的难点在于电机转速及同步电角度的计算。研究了感应电机矢量控制系统工作原理。通过基于软锁相环方法解算电机转速、角度。通过感应电机磁链模型解算转差转速。利用电磁感应原理使用定子电流和电机参数实现了转差转速计算,克服了转子电流不可测的缺点。模型矢量控制用电角度采用电机转速与转差转速分别积分再求和的方法求得。建立仿真模型,取合适的控制参数对控制环路进行仿真分析。搭建实验环境测试矢量控制效果,试验结果表明此通过河南求同电气科技有限公司(http://www.qtdq.com.cn)研发的微电网实验平台风力发电实验系统进行实验测试,结果表明此感应电机无传感器矢量控制系统快速、稳定。
关键词:软锁相环;转差转速;矢量控制;河南求同电气;风力发电实验系统
0 引 言
感应电机(Induction motor)具有结构简单、坚固耐用、工作稳定等优点,得到广泛应用。
但在数控车床加工、风电变桨控制、航空航天等对控制精度要求高的应用领域,传统变频控制的感应电机应用受到极大限制。
而一般感应电机矢量控制的难点在于电机转速及同步电角度的计算。
感应电机矢量控制的伺服控制系统一般包含位置、转速、电流环的多闭环系统。
转速和同步电角度的准确计算影响着感应电机矢量控制效果。
提高感应电机控制性能成为研究热点。
相关研究文献,要么算法过于复杂不利于嵌入式控制系统实际应用;要么系统不够稳定,鲁棒性较差。
本文研究了一种感应电机软锁相环矢量控制系统。依据坐标变换,在两相静止坐标系下建立感应数学模型,获得包含电机电角度、转速参数信息。借助角度观测器理论,设计了软锁相环并确定了其关键参数。利用电机磁链方程获得转差转速,并最终获得感应电机同步电角度及转速信息。
1 感应电机矢量控制系统研究
感应电机磁场定向矢量控制由转速外环和转矩(电流)内环构成,其核心是在转子磁场旋转坐标系中针对励磁电流和转矩电流分别控制。感应电机矢量控制系统原理图如图1所示,
图1 感应电机矢量控制系统原理图
坐标变换中使用的转速外环角速度反馈值ω均由软锁相环角度、转速估算单元获得。电角度θ′由锁相环及转差估算所得角度两部分构成。本文采用实现方案为:使用包含角度信息的软锁相环角度观测器结合软锁相环估算方法进行锁相得到电机实际转速,再根据电机实时运行参数得到感应电机转差转速及转差角度,获取电机电角度、转速信息,最终建模实现感应电机矢量控制。
感应电机矢量控制系统设计难点在于实际转速及同步电角度计算,同步电角度可以分解成两部分,一部分为电机实际转速对应电角度,第二部分为转差转速对应的角度。因此感应电机实际转速以及转差转速计算方法非常重要。
2 感应电机转速及电角度计算
2.1基于软锁相环的转速、角度计算
感应电机在控制精度较高的领域应用时,为了提高控制精度,一般采用旋转变压器、编码器作为转速、角度传感器。旋转变压器输出结果为包含电机转速对应角度信息的正余弦信号。通常采用软锁相环来计算此角度信息。通过合理的锁相环模型[5]搭建,可以一并获得电机转速信息。
软锁相环一般由鉴相器、环路滤波器、压控振荡器三部分组成,结构框图如图2所示。
图2 基本软锁相环结构图
结合角度观测器的基本理论及三角函数变换公式
(1)
当θ1→θ时相位锁定,有θ1=θ。应用到感应电机角度跟踪上,得到改进后的软锁相环控制流程图如图3所示。
图3软锁相环获得电机角度、转速流程
软锁相环闭环传递函数为
(2)
式中:s为微分算符。
通过合理的kp、ki参数的选取就能够获得软锁相环理想的动态响应及稳态效果。进而求解获得感应电机转速及此转速对应角度信息。
2.2 转差转速计算
感应采用三相交流供电,具有多变量、强耦合、非线性的特点,控制复杂。感应电机转子可等效成首尾闭合的线圈绕组,其电流不可测量,根据基尔霍夫电压定律有,
(3)
式中:R
r
为转子
电阻,I
r
为转子电流,
Ψ
为绕组磁
链,且有,
(4)
式中:L
m
为励磁电感,I
s
为定子电流。
将(4)代入(3),有
(5)
这样便获得了磁链与定子电流关联方程。为了简化控制,在保证输出磁链等效的前提下引入坐标变换思想,将感应电机简化为直流电机进行控制。假设感应电机是线性的,忽略涡流和磁滞损耗,对于三相对称,气隙均匀的感应电机,将式(5)分解为旋转坐标系dq,d为磁链方向,q为磁链垂直方向,有
(6)
磁链变化量即为转差转速
ω
△
,由式(6)可知
,
(7)
综合式(7)可知,转差转速计算如下,
(8)
磁链变化量即为转差转速
ω
△
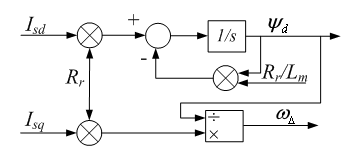
,由式(8)可知转差转速可按照图4计算。
图4 感应电机转差转速计算原理图
2.3感应电机转速及电角度计算
感应电机矢量控制系统中转速环使用的反馈转速为电机实际转速,可以通过3.1部分的软锁相环计算获得。
感应电机矢量控制系统中电角度分为两部分,一部分为实际转速计算所得角度,一部分为转差转速计算所得角度。结合3.1与3.2部分内容可知
(9)
R
r
、L
m
可以通过感应电机空载法和堵转法测试计算获得。
3 感应电机矢量控制仿真建模
按照图1所示的感应电机矢量控制系统原理图,使用Matlab工具建立仿真模型,如图5。
图5 感应电机矢量控制仿真模型
图中Va、Vb、Vc等量为驱动器经过控制器、坐标变换、IGBT等模块后输出的电压控制量。
感应电机使用Matlab工具库自带模型,选择4kW电机,参数Lm=172mH,Rs=1.4Ω,基于转差角度计算所得角度与基于软锁相环计算所得电角度求和获得最终电机电角度计算仿真模型如图6所示。
图6 感应电机电角度计算仿真模型
图中θ为基于软锁相环解算而来电机实际转速考虑到极对数时对应角度值,Rho为感应电机电角度。
4 感应电机矢量控制仿真分析
设计了一款伺服驱动器,模拟量采样频率为8kHz,电流采样处理电路时间常数Tif=0.000073s电流环控制器PI调节器参数kp =5.36,ki =2857。锁相环PI调节器参数kp =65200,ki =28。配合合适的转速环参数[8]进行仿真分析。
4.1 矢量控制系统稳定性分析
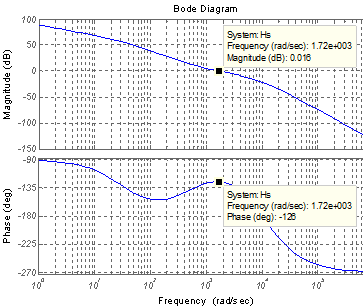
仿真分析矢量控制环路开环传递函数的波特图如图7所示,
图7 电流开环传递函数波特图
根据乃奎斯特判据,结合图7知系统在幅频特性曲线0dB时,稳定相角裕度为54°,系统稳定。
4.2 转速及电角度计算精度仿真结果
将位置传感器计算所得的转速、角度投入到图1所示的矢量控制模型中,观察锁相环输出稳定性及动态特性。选择额定转速为1800rpm(极对数3)的感应电机作为控制对象,设计合适的转速及电流环控制器参数及负载扭矩,在给定转速为0→1800rpm时,记录传感器计算所得转速、角度信号及软锁相环估算转速、角度信号曲线如图8所示。
图8 转速及电角度软锁相环估算
值与实际值
图8中,基于软锁相环感应电机矢量控制系统,转速、电角度在参与闭环控制时,系统稳定且动态特性很好。
5 实验验证及结论
实验平台采用河南求同电气科技有限公司(http://www.qtdq.com.cn/)的微电网之风力发电实验系统,如图9所示。
图9 河南求同电气风力发电实验系统
该实验系统系统采用7.5kW感应电机一台,模拟风轮。
5.5kW三相永磁电机一台,模拟风力发电机,两电机通过联轴器连接,底部槽钢底座固定。
永磁同步电机及感应电机的控制器均为公司自研的伺服控制器。
核心芯片为TI公司TMS320F28335的浮点DSP,整体程序开源,且采用MATLAB自动代码生成。
在此平台上可以快捷,方便的将自研感应电机软锁相环双闭环矢量控制算法集成到控制程序中,进行一键下载验证。
感应电机额定转速为1800rpm、极对数3,作为拖动对象。
监控后台编程实现给定转速为1600rpm→780 rpm→1500 rpm,模拟风轮载荷快速变化时系统工作动态特性。上位机软件录波方式记录电机实际转速(rpm)响应曲线如图10所示。
图10 扰动给定时感应电机实际转速响应
通过河南求同电气微电网实验平台进行感应电机无传感器矢量控制算法的实验验证,结果表明基于软锁相环及感应电机转差计算所得转速、电角度进行闭环矢量控制时,系统稳定且动态特性很好,与仿真结果一致。
附图 河南求同电气科技有限公司微电网实验系统
http://www.qtdq.com.cn
上一篇:
一种简约有效的微电网软锁相环研究
下一篇:
光伏MPPT系统电压控制器的优化研究
相关产品
新能源车工况模拟系统
积木式电力电子技术开发平台
电力系统及综合自动化教学实验平台(5+1)
开放式电能变换与控制技术开发平台
微电网开放式科研开发平台
兆瓦级风力发电机组仿真实验系统
风电场监控系统仿真
电力物联网实验系统
首页
产品
咨询
拨号
导航


 (1)
(1)
 (2)
(2) (3)
(3) (4)
(4) (5)
(5) (6)
(6) (7)
(7) (8)
(8)
 (9)
(9)







 (1) (2) (3) (4) (5) (6) (7) (8)(9)
(1) (2) (3) (4) (5) (6) (7) (8)(9)